Hazard Hunter
Mars Rover Hazard Detection - Image Processing Project
Tech Stack

Python

What is it?
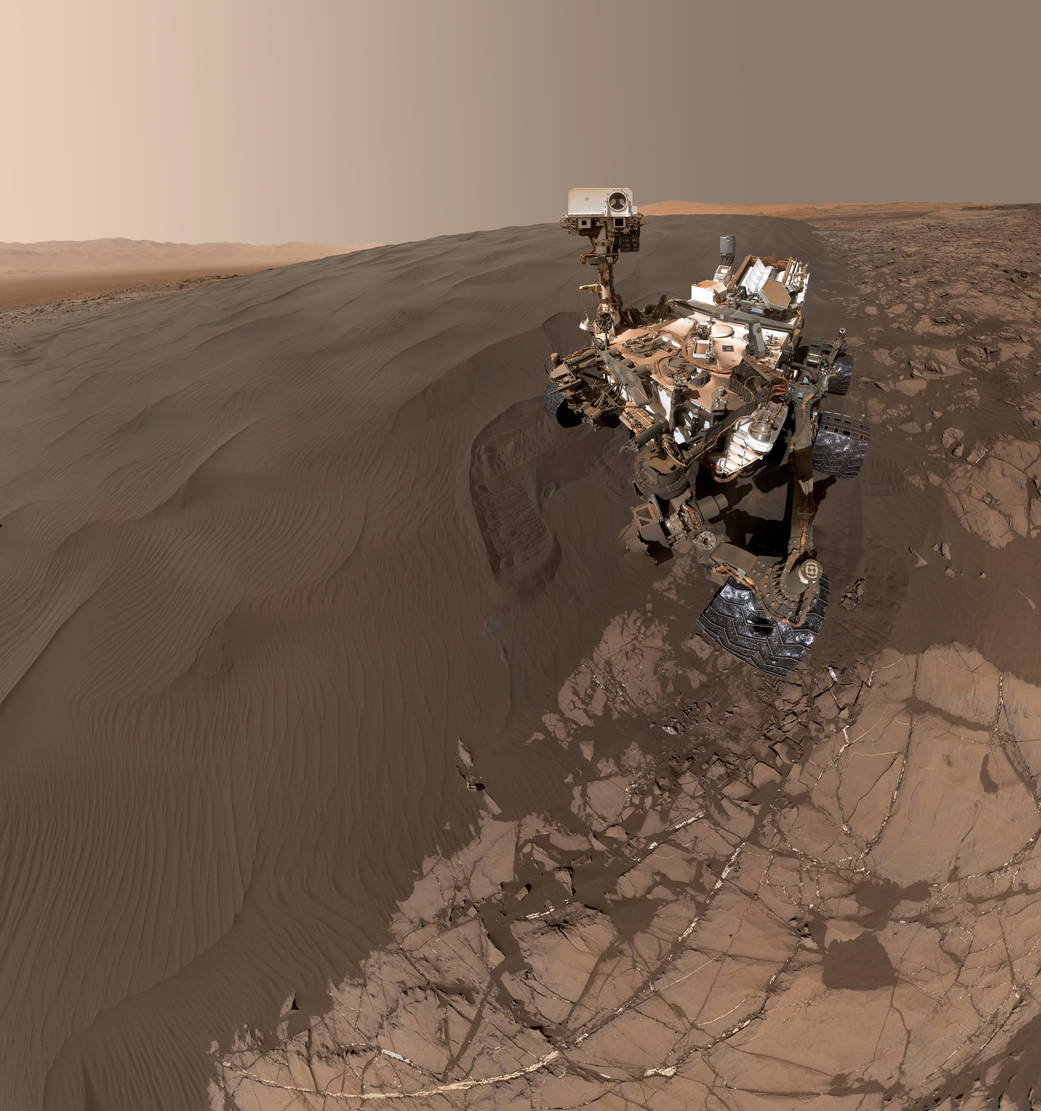
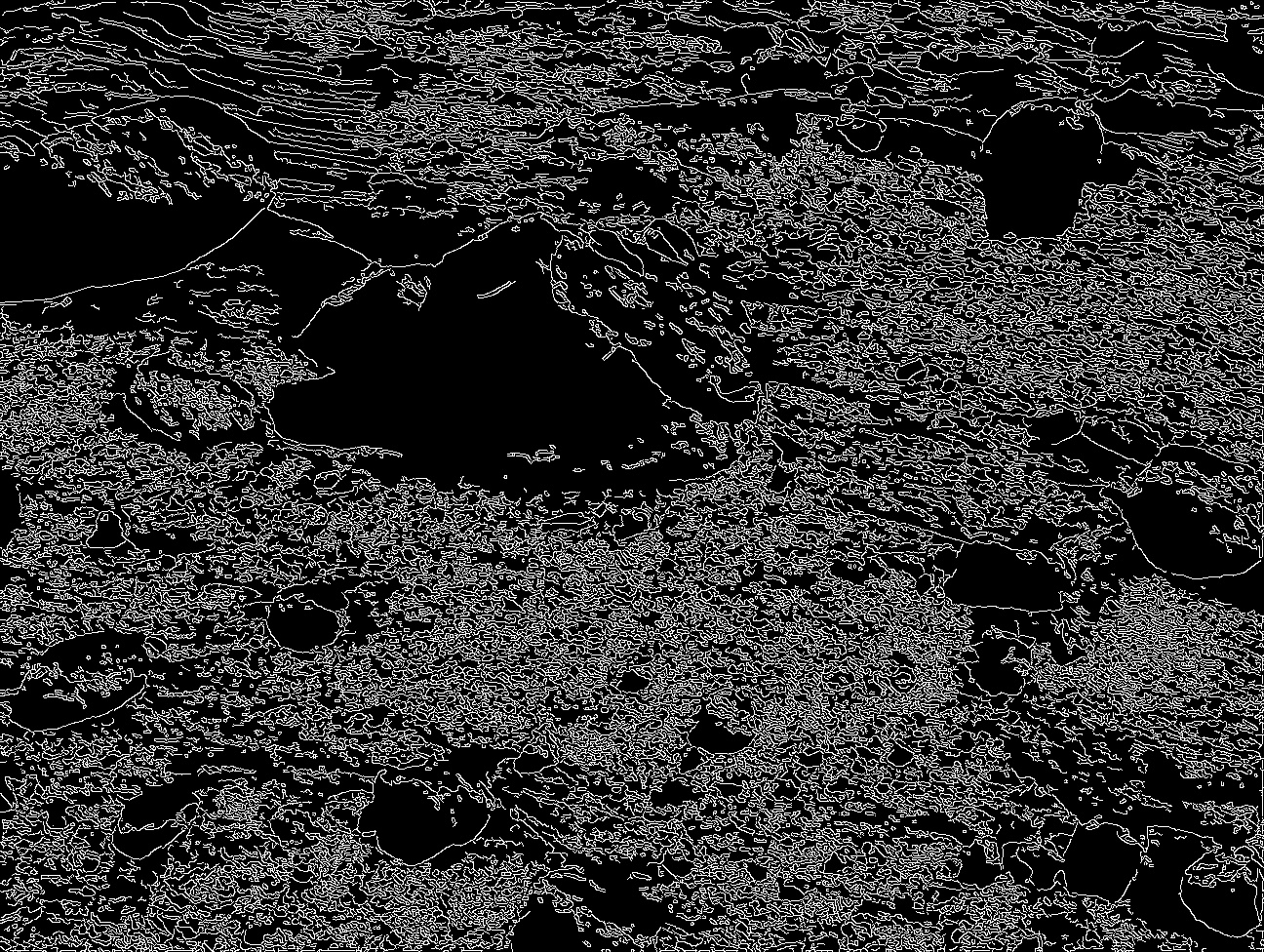
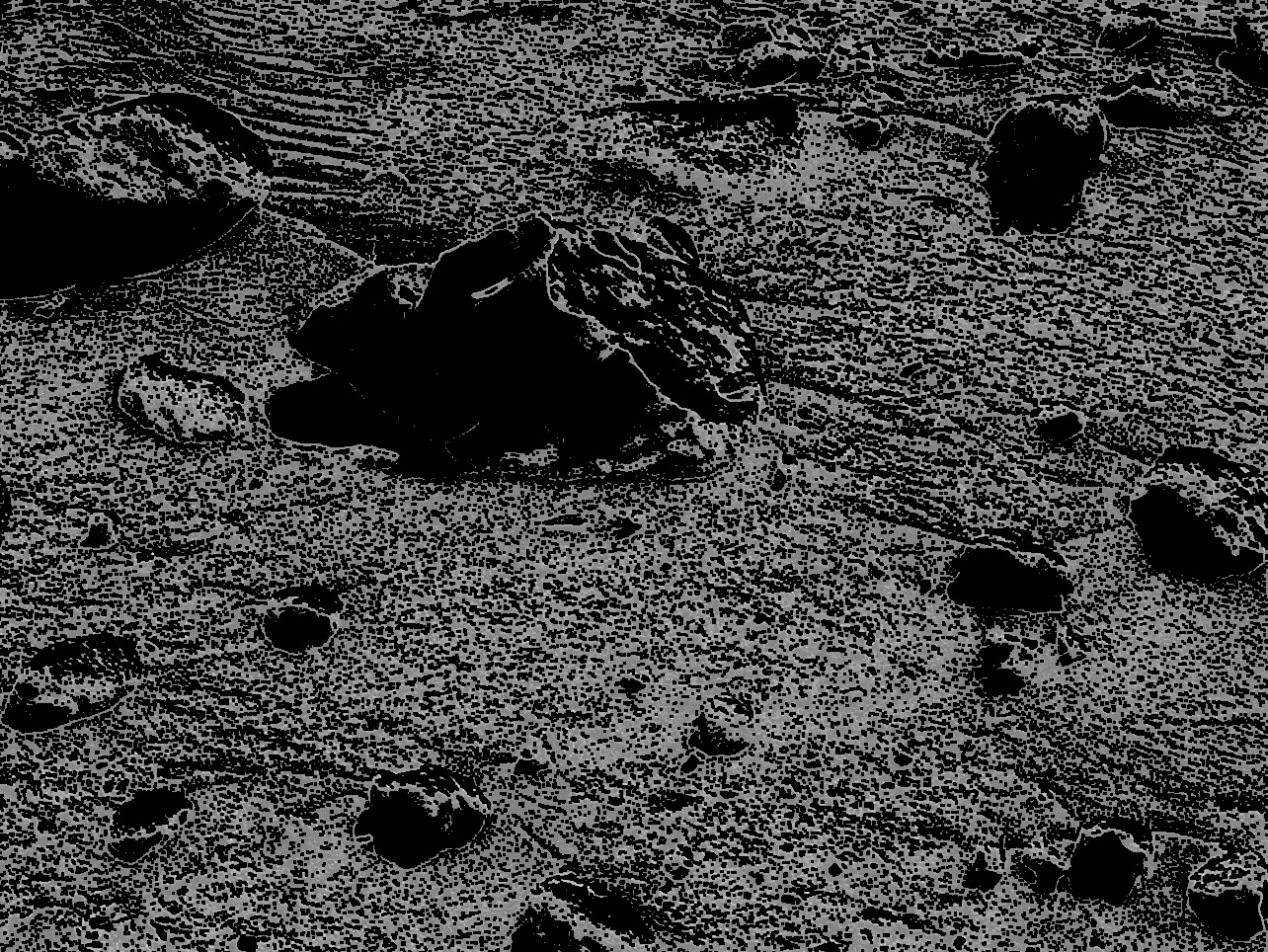
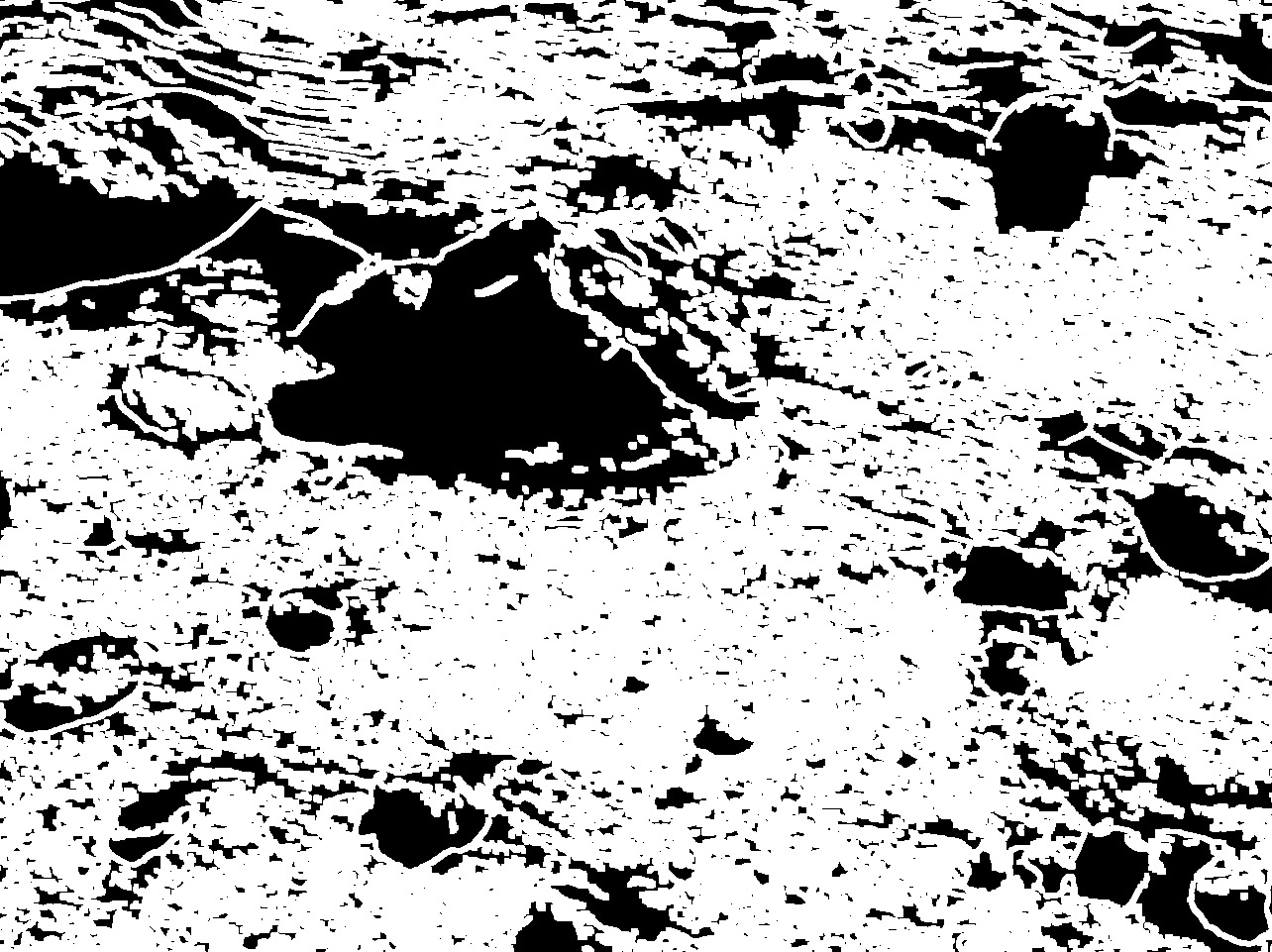
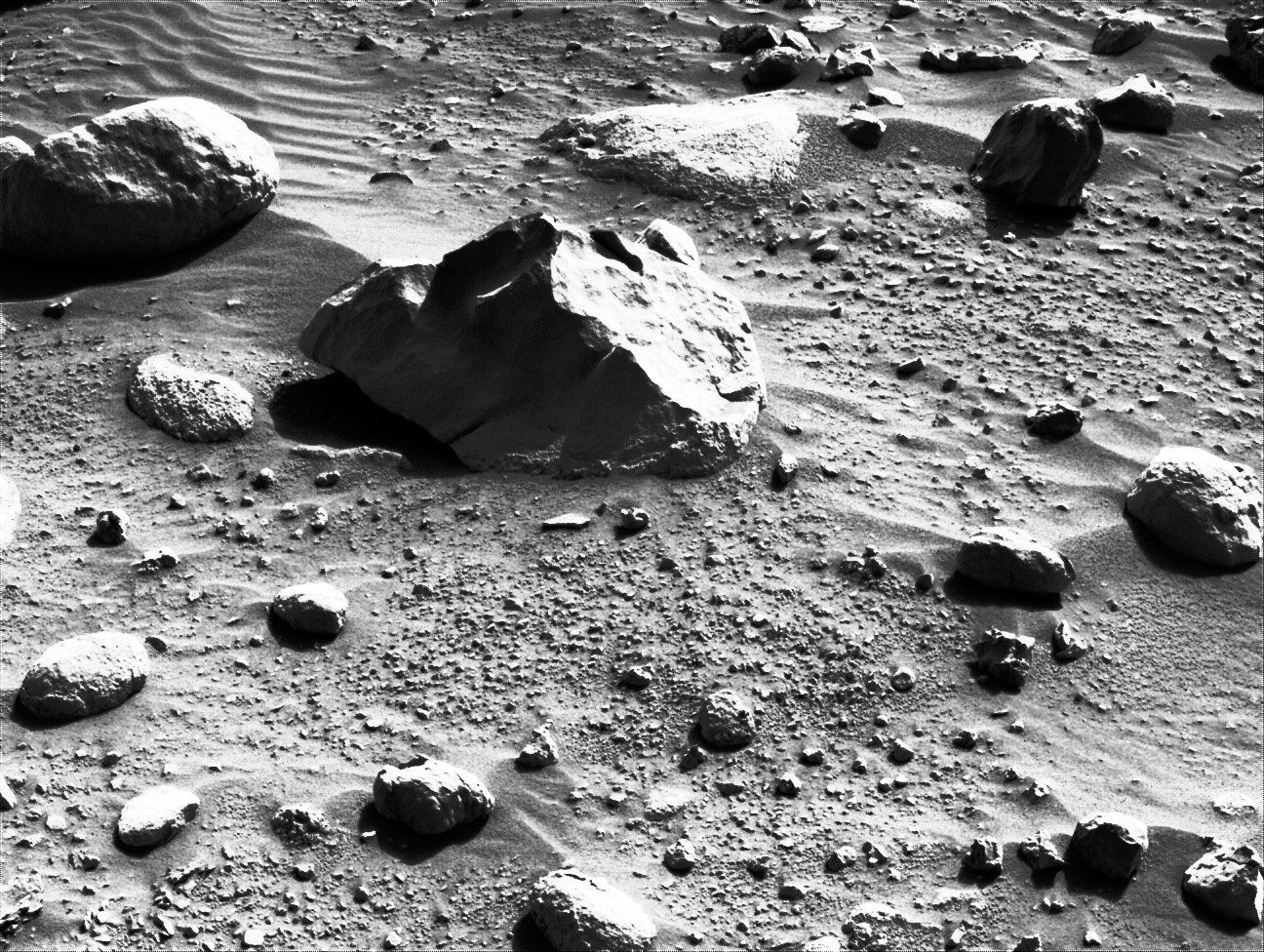
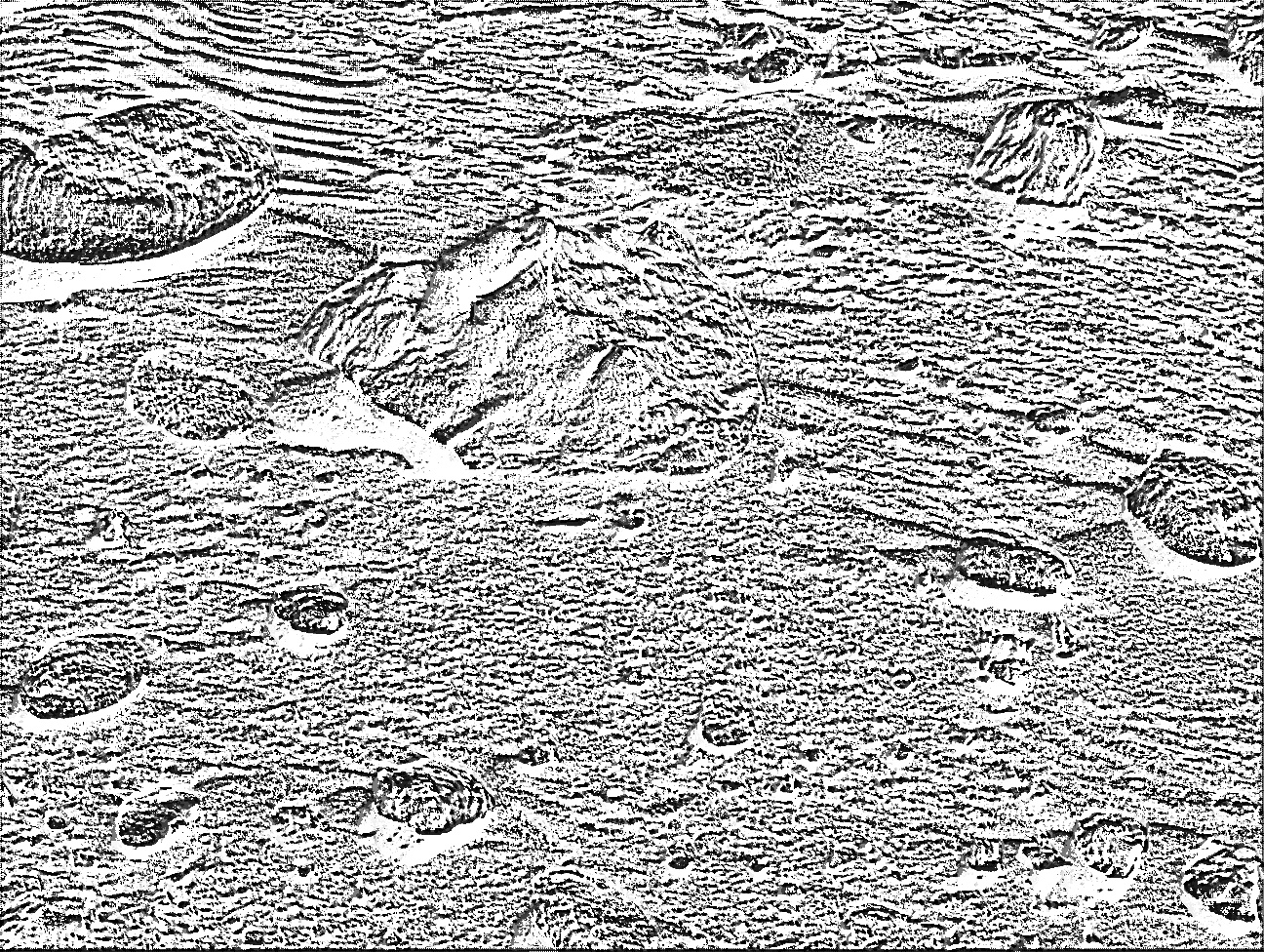
Our mission was to utilize Image Processing techniques to understand Mars' layout and identify hazards for the rover's safety. With over 100,000 NASA-provided images, we developed a Machine Learning algorithm to analyze and detect hazards accurately. Most algorithms improved the model, but one decreased accuracy due to noise. Training the AI took around 4 hours with that algorithm, compared to 20-30 minutes without it.Our algorithm employed various techniques, including preprocessing, edge detection (Canny, Gaussian, Laplacian), morphological operations, and local binary patterns. Despite limitations in achieving 100% accuracy, we achieved significant progress by leveraging a large sample size, iterating the data, and using oversampling techniques.